
الکتروموتور دور بالا AC و DC تک فاز و سه فاز
الکتروموتور چیست؟
الکتروموتورها از یک اصل برای تولید حرکت استفاده می کنند و آن اصل مغناطیس می باشد (قطب های هم نام آهنربا یکدیگر را دفع می کنند و قطب های غیر هم نام یکدیگر را می ربایند.)
قاعده کلی این است که وقتی یک ماده حامل جریان الکتریکی تحت اثر یک میدان مغناطیسی قرار میگیرد، نیرویی بر روی آن ماده از سوی میدان اعمال می گردد.
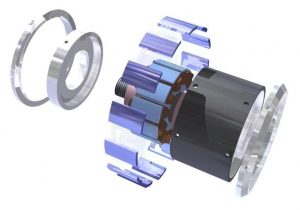
بیشتر موتور های الکتریکی دوار هستند . در یک الکتروموتور بخش دوار که معمولا داخل الکتروموتور است ،روتور و بخش ثابت ، استاتور نام دارد.
راهنمای کامل خرید انواع الکتروموتور و معرفی انواع آن را از اینجا بخوانید.
انواع الکتروموتور از نظر جریان مصرفی:
الکتروموتور Alternative Current یا جریان متناوب AC
الکتروموتور Direct Current یا جریان مستقیم DC
الکتروموتور جریان متناوب یا AC
الکتروموتور سنکرون Synchronous
در الکتروموتورهای سنکرون، روتور و استاتور سیم پیچی می شوند. هنگامی که استاتور به منبع برق متصل می شوند، میدان گردان در الکتروموتور بوجود می آید که با سرعت سنکرون می چرخد. روتور نیز سیم پیچی شده است که توسط منبع DC تغذیه می شود. با اتصال جریان DC به روتور، روتور شروع به گردش با میدان دواراستاتور می کند. برای راه اندازی الکتروموتور سنکرون، ابتدا الکتروموتور پس از قطع محرک اولیه با سرعت سنکرون می چرخد.
الکتروموتور آسنکرون Asynchronous
قفسه سنجابی
روتور الکتروموتورهای قفسه سنجابی استوانه ای شکل است که میله هایی از جنس آلومینیوم و یا مس درون شیارهای محیطی آهنی و یا فولادی قرار دارد که به دو صورت ساخته می شود
که نوع اول از میله های گرد تشکیل شده است و نوع دوم از میله های مستطیلی و یا به شکل دو دایره که به هم متصل و یا جدا از هم هستند تشکیل می شود.
میله های روتور الکتروموتور را به این دلیل مورب طراحی می کنند که در تاثیر میدان های استاتور بر روی روتور نوعی هم پوشانی به وجود آید و از لرزش و یا قفل شدن در لحظه استارت جلوگیری به عمل آید.
روتور سیم پیچی شده Slip Ring
الکتروموتور های قفسه سنجابی مقاومت بسیار پایین روتور در آن مشهود است.
میله های روتور توسط حلقه ای در ابتدا و انتهای آن اتصال کوتاه شده است.
این مسئله در لحظه استارت که روتور مغناطیسی نیست شار (خطوط میدان الکتریکی که از سطح عمود بر مسیر عبور می کنند را شار الکتریکی گویند ) زیادی را برای مغناطیس شدن به خود جذب می کند و باعث بالارفتن جریان الکتروموتور می شود
در نتیجه در لحظه استارت جریان زیادی را از شبکه می گیرد و باعث کاهش گشتاور شروع می شود
برای رفع این مشکل الکتروموتور های روتور سیم پیچی شده طراحی و ساخته شدند که این عیب را تا حد زیادی مرتفع گردید.
الکتروموتور تک فاز AC
موتور های تک فاز بسیار متنوع هستند و بنابر ویژگیهای خود در موارد مختلف کاربرد دارند.
عامل ایجاد چرخش در موتورهای القایی سه فاز، ایجاد میدان دوار در داخل استاتور میباشد.
در صورتی که با عبور جریان AC تک فاز از یک سیم پیچ میدان ضربانی ایجاد میشود.
موتورهای تک فاز القایی بر اساس انتخاب المان ایجاد کننده اختلاف فاز به صورت ذیل دسته بندی میشوند:
- موتورهای القایی تک فاز با فاز شکسته
- موتورهای القایی با خازن راه انداز
- موتور القایی با خازن دائم کار
- موتورهای القایی دو خازنی – خازن راه انداز و دائم کار
- موتور القایی قطب چاک دار
الکتروموتور سه فاز
برای کاربردهای نیازمند به توان بالاتر، از الکتروموتورهای القایی سه فاز AC (یا چند فاز) بالاترین دور موتور الکتریکی استفاده میشود.
این الکتروموتورها از اختلاف فاز موجود بین فازهای منبع تغذیه چند فاز الکتریکی برای ایجاد یک میدان الکترومغناطیسی دوار درونشان، استفاده میکنند.
اغلب، روتور شامل تعدادی هادیهای مسی است که در فولاد قرار داده شدهاند.
از طریق القای الکترومغناطیسی میدان مغناطیسی دوار در این هادی ها القای جریان میکند، که در نتیجه منجر به ایجاد یک میدان مغناطیسی متعادل کننده شده و موجب میشود که محور الکتروموتور در جهت گردش میدان به حرکت در آید.
این نوع از الکتروموتور با نام الکتروموتور القایی معروف است.
برای اینکه محور این الکتروموتور به حرکت درآید بایستی همواره محور الکتروموتور با سرعتی کمتر از فرکانس منبع تغذیه اعمالی به الکتروموتور بچرخد، چرا که در غیر این صورت میدان متعادل کنندههای در روتور ایجاد نخواهد شد.
استفاده از این نوع الکتروموتور در کاربردهای ترکشن نظیر لوکوموتیوها، که در آن به موتور ترکشن آسنکرون معروف است، روز به روز در حال افزایش است.
به سیم پیچهای روتور جریان میدان جدایی اعمال میشود تا یک میدان مغناطیسی پیوسته ایجاد شود، که در الکتروموتور همزمان وجود دارد،
الکتروموتور به صورت همزمان با میدان مغناطیسی دوار ناشی از برق AC سه فاز، به گردش در میآید.
الکتروموتور های همزمان (سنکرون) را میتوانیم به عنوان مولد جریان هم بکار برد.
سرعت یک الکتروموتور AC در ابتدا به فرکانس تغذیه بستگی دارد و مقدار لغزش، یا اختلاف در سرعت چرخش بین روتور و میدان مغناطیسی استاتور، گشتاور تولیدی موتور را تعیین میکند.
تغییر سرعت در این نوع از الکتروموتورها را میتوان با داشتن دسته سیم پیچهای مختلف با تعداد قطبهای مختلف در بخش استاتور که با استفاده از آنها سرعت میدان دوار مغناطیسی تغییر میکند، ممکن ساخت.
همچنین با تغییر دادن فرکانس منبع تغذیه، میتوان کنترل یکنواخت تری بر روی سرعت این نوع ازالکتروموتور را داشت.
انواع الکتروموتور سه فاز
الکتروموتور القایی سه فاز قفس سنجابی
الکتروموتور القایی سه فاز قفس سنجابی با روتور سیم پیچی شده ( اسلیپ رینگ )
روش راه انداز موتور سه فاز:
۱- نصب کنتاکتور با شستی استپ و استارت
۲-نصب کنتاکتور با کلید فرمان
الکتروموتور DC
الکتروموتور DC یا جریان مستقیم:
موتور الکتریکی جریان مستقیم به سه نوع الکتروموتور DC سری (Series) ؛ الکتروموتور DCشانت (Shunt) و الکتروموتور DC مرکب (Compound) تقسیم می شوند.
هر یک از انواع این الکتروموتور ها دارای خصوصیات خاص خود می باشند که با توجه با کاربرد هر یک از آنها را می توان مورد استفاده قرار داد.
الکتروموتور DC سری :
الکتروموتور DC سری دارای گشتاور راه انداز بالا بوده و از این رو در صنایعی که به گشتاور راه اندازی بالا نیاز است مانند پرس های ضربه ای جرثقیل ها ؛ بالابر هیدرولیک؛ آسانسور مورد استفاده قرار می گیرد.
همچنین از این نوع الکتروموتور در لوکوموتیو های شهری (مترو و تراموا) استفاده می شود که به آن اصطلاحا موتور کششی یا اصطکاکی (Traction Motor) نیز گفته می شود.
الکتروموتور DC شانت :
الکتروموتور DC شانت یا موازی دارای گشتاور حرکتی حداکثر در دور نامی می باشد.
به همین خاطر در کاربرد هایی چون هواکش های صنعتی و دمنده ها و … مورد استفاده قرار می گیرد.
این نوع موتورها نباید در زیر بار سنگین راه اندازی شوند چون جریان آرمیچر آنها بیش از حد بالا رفته و به موتور صدمه وارد می شود.
الکتروموتور DC کمپوند :
در الکتروموتورهای کمپوند خصوصیات موتور سری و شانت وجود دارد و شامل دو دسته هستند
الکتروموتور DC کمپوند اضافی
الکتروموتور DC کمپوند نقصانی
کاربرد الکتروموتور دوربالا تک فاز AC
ماشین های ابزار
اره برقی های صنعتی
کاربرد الکتروموتور دور بالا DC
فن های سانترفیوژ دور بالا
اسباب بازی
کاربرد در خودرو
ساخت انواع کاردستی
ماشین های RC سرعت بالا
دریل سوراخ کاری مدار چاپی
حکاکی
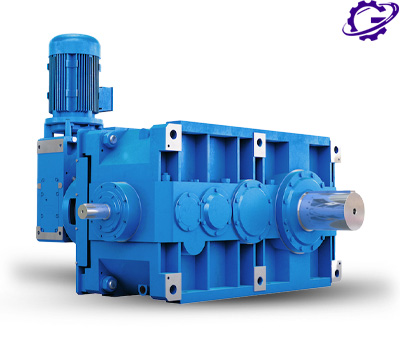
در بسیاری ازمواقع در ماشینآلات صنعتی به سرعت هایی متفاوت از سرعت های رایج الکتروموتورهای نیاز داریم؛ در برخی مواقع، بنا به محدودیت فضا، نیازمند تغییر زاویه محور دَوران نیز هستیم.
گیربکس ها یکی ازبهترین و ایمن ترین روشهای رفع این نیاز می باشد.
در چه زمانی از گیربکس استفاده می کنیم؟
برای تبدیل دور بالای الکتروموتور به نسبت بالا (سرعت خروجی پایین) برای تبدیل گشتاور پایین الکتروموتور به گشتاور وراندمان بالاتر (بسته به دور خروجی متفاوت است) برای تغییرجهت محور دوران و … می توان از گیربکس که مجموعه ای ازچرخ دنده هاست، استفاده نمود.
به منظور دریافت مشاوره، آگاهی از لیست قیمت و سفارش محصولات با مشاورین و کارشناسان شرکت گذرگاه صنعت و تجارت ایرانیان تماس حاصل فرمایید.
72 437 888 – 89 200 888 –021
فکس : 15 230 888 –021
در اسرع وقت پاسخگو هستیم.




سایتتون حرف نداره
مطلب خوبی بود تشکر