الکتروموتور ها نوعی از ماشین ها هستند که انرژی الکتریکی را به انرژی مکانیکی یا حرکتی تبدیل می کنند. مکانیزم این ماشین بر اساس خاصیت الکترومغناطیسی می باشد. در حقیقت زمانی که یک جسم حامل جریان الکتریکی، در یک میدان مغناطیسی و تحت نیرو قرار می گیرد، این نیرو سبب چرخش اجزا و نهایتا ایجاد نیروی مکانیکی می گردد.
بر همین اساس به الکتروموتور ها، موتور های الکتریکی نیز می گویند که غالبا به صورت دوار هستند ولی نوع غیر دوار یا خطی آن ها نیز موجود است.
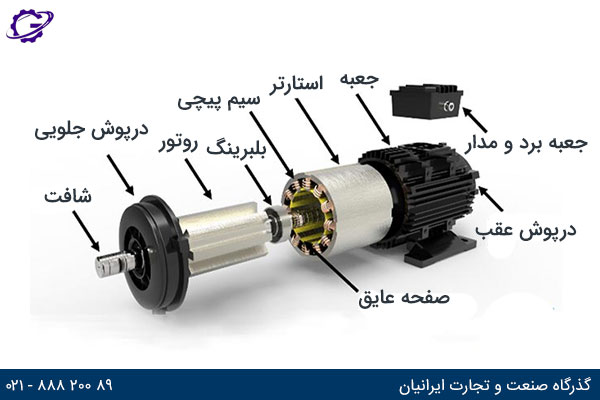
اجزای داخلی و اصلی الکتروموتور های دوار شامل دو قسمت متحرک و محرک است که بخش متحرک به روتور و بخش محرک یا ثابت که درون موتور قرار دارد، استاتور می گویند. مکانیزم این اجزا بدین صورت است که به دلیل گشتاور ناشی از نیروی ایجاد شده توسط میدان مغناطیسی، روتور در استاتور حول محور خود می چرخد و نیروی مکانیکی را ایجاد می کند.
الکتروموتور های خطی نیز گونه دیگری از الکتروموتور ها هستند که تفاوت آن ها با نوع دوار در آن است که به جای تولید یک گشتاور گردشی، تحت تاثیر ایجاد یک میدان الکترومغناطیسی سیار در طولش، یک نیروی خطی به وجود می آورد.
هریک از این الکتروموتور ها (دوار و خطی) خود در انواع مدل های مختلفی تولید و بکار برده می شوند.
تقسیم بندی الکتروموتور ها متناسب با عوامل مختلفی انجام میگیرد. این عوامل شامل نوع جریان مصرفی، منبع تغذیه و کارایی فنی می باشد.
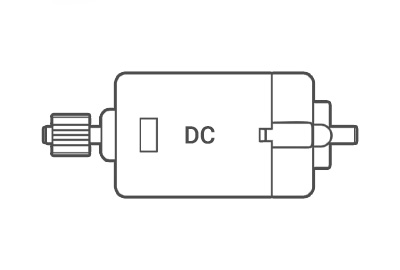
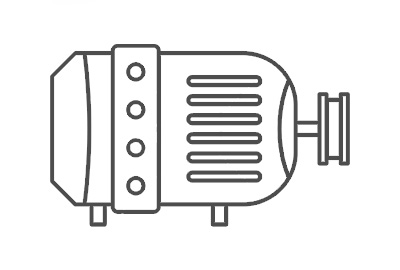
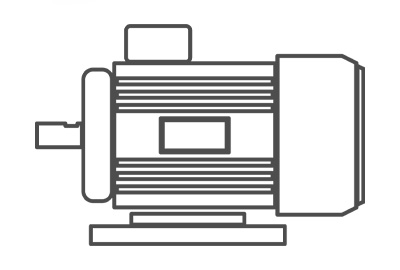
لذا می توان انواع موتور های الکتریکی را به الکتروموتور های DC، الکتروموتور های AC و سایر الکتروموتور های خاص (استپر موتور، سروو موتور و…) دسته بندی کرد. هریک از این مدل ها دارای اجزا، مشخصات و ویژگی های منحصر به فرد بوده و کارایی هریک از این الکتورموتور ها متفاوت است.

انواع الکتروموتور abb و کوپلینگ آن
شماره تماس: 20089 888 - 021
بر خلاف الکتروموتور های AC و DC که به منظور تبدیل پیوسته انرژی بکار می روند، در موتور های خاص تبدیل انرژی به صورت پیوسته نبوده و هدف کارکرد آن ها تغییر مکان از یک وضعیت خاص به وضعیتی دیگر می باشد.
از جمله انواع الکتروموتور های خاص می توان به استپر موتور (Stepper motor)، سروُ موتور یا پله ای (Servo motor)، موتور یونیورسال (Universal motor)، موتور بدون جاروبک (Brushless motor)، هیسترزیس (Hysteresis motor) و رلوکتانس (Reluctance motor) اشاره کرد.
انتخاب صحیح الکتروموتور یکی از ضروری ترین امور مهندسی در هر واحد صنعتی می باشد .
ویژگی های موتور به طور گسترده با ماهیت کاربردشان و نوع وظیفه ای که از آنها انتظار می رود متفاوت است
به منظور ساخت الکتروموتور ها مانند دیگر ادوات صنعتی، استاندارد های معینی مورد بررسی قرار می گیرد که بر اساس این فاکتور ها دستگاه مورد نظر طراحی و تولید می گردد.
از جمله استاندارد های ساخت یک الکتروموتور شامل توان موتور، سرعت خروجی، نحوه اتصال الکتروموتور، فریم سایز، ولتاژ و آمپر موتور، فرکانس کارکرد، کلاس حرارتی موتور و درجه حفاظت در برابر نفوذ اجسام خارجی می باشد.
این فاکتور ها به صورت علائم بر روی بدنه الکتروموتور و به صورت پلاک نمایش داده می شود که با آگاهی از نحوه پلاک خوانی الکتروموتور ها می توان مشخصات فنی هر موتور را مشاهده کرد.
شماره تماس: 20089 888 - 021
سرعت / گشتاورکارکرد / ولتاژ / فرکانس منبع تغذیه / محل کارکرد الکتروموتور
برای خرید الکتروموتور مناسب باید اطلاعات دقیقی از محل و محیط نصب الکتروموتور در دست باشد .
اولین مرحله دور موتور الکتروموتور یا سرعت کارکرد
دومین مرحله محاسبه گشتاور
هنگام خرید موتور صنعتی باید به چند مورد مهم دقت کنیم که موتور الکتریکی متناسب با نیاز خود را تهیه کرده باشیم :
توان موتور – سرعت خروجی موتور – نحوه اتصال الکتروموتور به گیربکس – نوع نصب الکتروموتور به روش کدنویسی و پایه دار و فلنچ دار و … – ابعاد و فریم سایز الکتروموتور – ولتاژ و آمپر موتور – فرکانس موتور صنعتی – کلاس حرارتی موتور
| کلاس حرارتی | حداکثر دمای مجاز (درجه) |
| A | 105 |
| E | 120 |
| B | 130 |
| F | 155 |
| H | 180 |
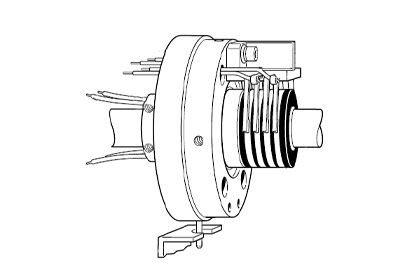
مشخصات و اجزای الکتروموتور ترمزدار
الکتروموتور ترمزدار
1- موتور های دریایی 2- موتور های فن دار 3- موتور های مناسب برای محیط های آتش ودود 4- موتور با رتور قفس سنجابی 5- موتور با رتور سیم پیچی شده 6- ژنراتور
الکتروموتور تکفاز : موتور مناسب برای کنترل دور
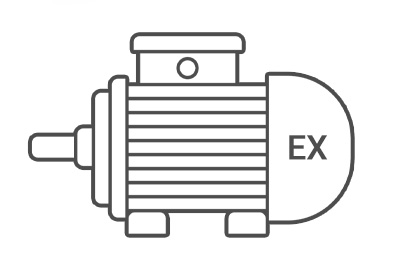
الکتروموتور دالاندر یا چند سرعته : موتورهای ضدانفجارکلاس E
شماره تماس: 20089 888 - 021
گیربکس میتواند در ازای کاهش دور، گشتاور را افزایش دهد یا در ازای کاهش گشتاور، دور را افزایش دهد.
در حالت ایده آل حاصلضرب دور در گشتاور در ورودی و خروجی گیربکس ثابت است، اما با توجه به تلفات انرژی در یک دستگاه مکانیکی این حاصلضرب در محور خروجی کمتر می شود.
برای خرید الکتروموتور دست دوم باید به موارد زیر توجه نمود.
به منظور دریافت مشاوره، آگاهی از لیست قیمت خرید و سفارش محصولات با مشاورین و کارشناسان شرکت گذرگاه صنعت و تجارت ایرانیان تماس حاصل فرمایید.
شماره تماس: 20089 888 - 021
فکس : 23015 888 - 021
در اسرع وقت پاسخگو هستیم