
الکتروموتور جریان مستقیم Direct Current – DC Motors
ماشین های الکتریکی (Electrical Machines)
ماشین های الکتریکی را به دو دسته می توان دسته بندی نمود:
- ماشین های الکتریکی از نوع تبدیل انرژی
- ماشین های الکتریکی از نوع جریان الکتریکی
ماشین های الکتریکی از نوع تبدیل انرژی به دو دسته موتور الکتریکی (Electric Motors) و ژنراتور الکتریکی (Electric Generators) تقسیم می شوند.
- موتور الکتریکی (Electric Motors) : در موتور الکتریکی انرژی الکتریکی به انرژی مکانیکی تبدیل می شود.
- ژنراتور الکتریکی (Electric Generators) : در ژنراتور الکتریکی انرژی مکانیکی به انرژی الکتریکی تبدیل می شود.
ماشین های الکتریکی از نوع جریان الکتریکی به دو دسته ماشین های الکتریکی جریان متناوب (Alternating Current Machine) و ماشین های الکتریکی جریان مستقیم (Direct Current Machine) طبقه بندی می شوند.
- ماشین های الکتریکی جریان متناوب (Alternating Current Machine) : ماشین های الکتریکی جریان متناوب برای کار در جریان متناوب (AC) طراحی می شوند.
- ماشین های الکتریکی جریان مستقیم (Direct Current Machine) : ماشین های الکتریکی جریان مستقیم برای کار در جریان مستقیم (DC) طراحی می شوند.

قانون القای الکترومغناطیس فاراده Faraday’s law of electromagnetic induction
بر اساس قانون القای الکترو مغناطیس فاراده مقدار نیروی محرکه القایی در هر مدار با آهنگ تغییر فوران متناسب است که بصورت رابطه زیر نمایش داده می شود:
e ~ Δϕ / Δt
درصورتیکه در آزمایش فاراده بجای استفاده از یک حلقه از سیم پیچ با N حلقه استفاده گردد آنگاه رابطه فوق به شکل فرمول زیر در می آید:
e = N * (Δϕ / Δt)
قانون لنز Lenz’s Law
تعریف قانون لنز: جریان القایی در جهتی برقرار می شود که با عامل بوجود آورنده خود مخالفت کند. قانون لنز در جریان های القایی و مدارهای بسته کاربرد دارد.
قانون لنز بصورت یک علامت منفی در رابطه قانون القای الکترومغناطیسی فاراده ظاهر می شود و e بعنوان نیروی ضد محرکه القایی (Counter Electromotive Force) نامیده می شود.
e = – N * (Δϕ / Δt)
موتورهای جریان مستقیم (Direct Current Motors) :
موتورهای جریان مستقیم انرژی الکتریکی را به انرژی مکانیکی تبدیل می کنند. این موتورها بر اساس تاثیر میدان مغناطیسی قطب ها بر میدان مغناطیسی اطراف هادی حامل جریان الکتریکی کار می کنند.
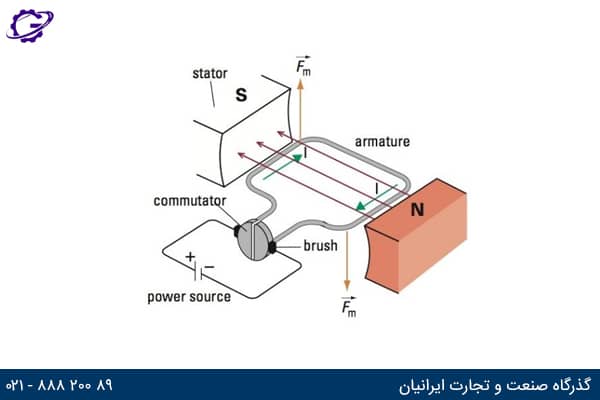
موتور ساده جریان مسستقیم
با اتصال منبع ولتاژ با جریان مستقیم به موتور ساده جریان مستقیم جریان از قطب مثبت و از طریق کموتاتور و جاروبک ها، از حلقه هادی عبور و به قطب منفی منبع می رسد.
با عبور جریان از حلقه هادی دو نیروی مغناطیسی در دو جهت مخالف یکدیگر به هر دو بازوی حلقه وارد شده و گشتاور بوجود آمده باعث گشتاور حلقه حول محور خود خواهد شد.
تا زمانیکه جريان از بازوهاي حلقه هادی جریان الکتریکی عبور می کند به آن ها نيروي مغناطيسي وارد شده و حلقه تحت تأثير گشتاور اين نيروها به گردش خود ادامه مي دهد.
ساختمان موتور های ساده جریان مستقیم
- حلقه هادی : از جنس مس بوده و می تواند آزاداننه حول محور خودش بین دو قطب N وS یک آهنربا گردش نماید.
- کموتاتور (Commutator) : سرهای حلقه هادی به دو نیم استوانه مسی لحیم شده که این دو نیم استوانه مسی با عایقی از جنس میکا از یکدیگر جدا شده اند. به هرک از این نیم استوانه های مسی، تیغه و به مجموعه تیغه ها و عایق میان آن ها کموتاتور (Commutator) می گویند.
- جاروبک (Brush) : جاروبک ها با سایش به تیغه های کموتاتور، ارتباط الکتریکی حلقه هادی با مدار خارجی را برقرار می سازند. جنس جاروبک ها معمولا از گرافیت یا گرافیت فلزی می باشد.
- قطب های مغناطیسی (Magnetic Pole) : قطب های مغناطیسی جهت ایجاد میدان مغناطیسی بوده که می تواند توسط آهن ربای دایم بوجود آید. به منظور ثابت نگه داشتن چگالی فوران مغناطیسی در هر نقطه از میدان مغناطیسی و در نتیجه ایجاد میدان مغناطیسی یکنواخت یا همگن، سطح قطب ها دارای انحنا می باشد.
سیم پیچ میدان (Field Winding) یا سیم پیچ تحریک(Exciter Winding) :
به منظور تولید میدان مغناطیسی می توان بجای استفاده از آهن ربای دایم، سیم پیچی بر روی قطب ها پیچید تا با عبور جریان از آن، میدان مغناطیسی ایجاد شود. این سیم پیچی را سیم پیچ میدان (Field Winding) یا سیم پیچ تحریک (Exciter Winding) می نامند.
میدان طولی (Direct Field) :
میدان مغناطیسی میان دو قطب غیر همنام میدان طولی نام دارد.
نیروی مغناطیسی وارد بر هادی حامل جریان الکتریکی:
به هر هادي حامل جريان در ميدان مغناطيسي، نيروي مغناطيسي وارد مي شود، به طوري كه نيروي مغناطيسي سعي به بيرون راندن هادي از درون ميدان مغناطيسي دارد که به آن نیروی لورنتس (Lorentz Force) و رابطه آن به شکل زیر نوشته می شود:
F=B x I x L
که در آن Fنيروي مغناطيسي بر حسب نيوتن (N)، B چگالي فوران مغناطيسي بر حسب وبر بر متر مربع (wb/m2)، I شدت جريان الكتريكي هادي بر حسب آمپر (A) و L طول مؤثر هادي كه تحت تأثير ميدان مغناطيسي قرار می گیرد و بر حسب متر(m) می باشد.
گشتاور نیروی مغناطیسی وارد بر حلقه حامل جریان:
به بازوهاي حامل جريان اين حلقه، نيروي مغناطيسي در دو جهت مخالف، با مقدار مساوي وارد می شود. اين نيروها در حلقه حامل جريان الكتريكی، گشتاور (Torque) ايجاد می کنند و آن را حول محور می گردانند.
بنابراین عامل گردش، گشتاور بوده که از حاصلضرب نیروی مغناطیسی هر بازو در شعاع حلقه (r) بدست می آید و از رابطه T=F*r محاسبه می شود. واحد گشتاور نیوتن متر است.
مقدار لحظه ای گشتاور (T) در موتور ساده DC از رابطه زیر محاسبه می شود:
T=2 x N x B x I x L x r x Sinα
که در آن N تعداد دور حلقه، B چگالي فوران مغناطيسي قطبها،L طول مؤثر هر بازوي حلقه در ميدان مغناطيسی، I شدت جريان حلقه، r شعاع حلقه،α زاويه بين سطح حلقه با صفحه خنثي و T گشتاور می باشد.
گشتاور در موتور ساده جريان مستقيم بسيار كم بوده و يكنواخت نبودن گشتاور و همچنين عدم راه اندازي هنگامی كه حلقه در صفحه خنثي است، از معايب موتور ساده جريان مستقيم محسوب مي شود و باعث شده است تا اين موتور غيرقابل استفاده باشد.

اجزای تشکیل دهنده Stator
- بدنه : بعنوان تکیه گاه و محافظ سایر اجزای ماشین بوده و بوسیله تعبیه پایه ها بر روی آن ماشین توسط پیچ و مهره در محل مورد نظر نصب می شود. بدنه می تواند از جنس چدن (جهت کاهش هزینه ) یا فولاد ساخته شود.
- قطب های مغناطیسی : جهت تامین میدان مغناطیسی مورد نیاز بوده که در بدنه ماشین تعبیه می شوند. تعداد این قطب ها همواره زوج و از جنس ورقه های فولاد الکتریکی می باشند.
نکته: در برخی موارد قطب هایی به نام قطب کموتاسیون (Commutating Pole) یا میان قطب (Inter Pole) در بین قطب های ماشین های جریان مستقیم در نظر گرفته می شوند.
- سیم پیچی میدان : میدان مغناطیسی اصلی ماشین جریان مستقیم توسط اعمال جریان مستقیم به سیم پیچ میدان ایجاد می شود.
نکته: برای جریان های کم تعداد دور سیم پیچ میدان زیاد و سطح مقطع سیم کم می باشد؛ و در جریان های زیاد تعداد دور سیم پیچ کم ولی سطح مقطع سیم بزرگ می باشد.
- جاروبک نگه دار : وسیله ایست که وظیفه قراردادن صحیح جاروبک ها روی تیغه های کموتاتور را دارد. جاروبکهای تعبیه شده در جاروبک نگه دار توسط فنری با فشار قابل تنظیم بر روی کموتاتور فشار داده می شود.
اجزای تشکیل دهنده Rotor
- هسته روتور : هسته روتور از ورقه های فولادی سیلیس دار با شیارهایی جهت قرار گیری سیم پیچ بر روی آن ها ساخته می شود. این ورقه های با لایه نازکی از یکدیگر عایق می شوند. با توجه به گرم شدن هسته روتور هنگام کار ماشین، معمولا روتور ها بصورت تهویه محوری یا تهویه شعاعی ساخته می شوند.
- سیم پیچی روتور : این سیم پیچی از کلاف های مشابهی براساس طراحی ماشین های جریان مستقیم تشکیل شده است. از آنجاییکه ماشین های جریان مستقیم ولتاژ اصلی در سیم پیچی روتور القا می شود به آن سیم پیچی آرمیچر و به روتور ماشین جریان مستقیم نیز آرمیچر می گویند.
جهت اتصال كلاف هاي سيم پيچي آرميچر به تيغه هاي كموتاتور ماشين هاي جريان مستقيم روش هاي گوناگوني وجود دارشته که دو روش متداول تر آن حلقوي و موجي می باشد. انجام هر يك از روش های فوق باعث ايجاد سيم پيچي حلقوي و سيم پيچي موجي در رتور ميشود.
سيم پيچي هاي حلقوي و موجي از نظر شكل سيم پيچي و نحوه اتصال كلاف ها به تيغه هاي كموتاتور با يكديگر متفاوت بوده و به دو صورت ساده و مرکب اجرا می شوند.
- کموتاتور : کموتاتور از تیغه های مسی عایق شده توسط میکا نسبت به یکدیگر و محور ماشین تشکیل شده است.
- محور : محور ماشین های جریان مستقیم از فولادی ساخته می شود که خاصیت مغناطیسی آن کم بوده و استحکام مکانیکی کافی در برابر تنش های کششی، پیچشی، برشی و خمشی را داشته و تکیه گاهی برای سایر قسمت های روتور می باشد.
- پروانه خنک کننده : با توجه به ایجاد گرمای ایجاد شده در ماشین های جریان مستقیم، پروانه خنک کننده یا فن با ایجاد جریان هوا داخل ماشین باعث انتقال سریع تر گرما به خارج از ماشین و در نتیجه کاهش دمای کاری و افزایش طول عمر ماشین را منجر خواهد شد.
پروانه خنک كننده ماشين هاي جريان مستقيم با قدرت كم، روي محور رتور نصب و با گردش رتور چرخیده و جريان هوا را ایجاد می نماید.
اما ماشين هاي با قدرت متوسط و زياد فاقد پروانه خنك كننده روي محور رتور بوده و تهويه ماشين توسط فن جداگانه ای كه داراي فيلتر هوا به منظور جذب ذرات گرد و غبار مي باشد و توسط يك موتور سه فاز به گردش در مي آيد صورت مي پذيرد.
نکته: یکی از عوامل موثر در تعیین مقدار هر یک از کمیت های فوق، نوع سیم پیچی آرمیچر می باشد؛ بنابراین با انتخاب نوع سیم پیچی مناسب می توان مقدار مطلوب هر کمیت را بدست آورد.
کمیت های الکتریکی سیم پیچی آرمیچر
نیروی محرکه القایی : در موتورهای جریان مستقیم نیروی محرکه القایی در سیم پیچی آرمیچر، با گردش روتور ایجاد می شود.
نیروی محرکه القایی هر کلاف در هر راه جریان که بصورت سری به یکدیگر متصل شده اند، با یکدیگر جمع می شوند و از آنجاییکه تعداد کلاف های هر راه جریان سیم پیچی نوع موجی بیش تر از سیم پیچی نوع حلقوی می باشد.
بنابراین نیروی محرکه القایی مسیر جریان در سیم پیچی نوع موجی بیش تر است.
نيروي محركه القايي سيم پيچي موتور هاي جريان مستقيم از رابطه زیر محاسبه می شود:
EA=(P/a) x Z x ϕ x (n/60)
که در آن n سرعت گردش رتور بر حسب دور بر دقيقه (RPM)، ϕ فوران هر قطب بر حسب وبر (wb)، Z تعداد هادي هاي درون شيارهاي روتور،P تعداد قطب هاي استاتور، a تعداد راه جريان سيم پيچي آرميچر و EA نيروي محركه القايي سيم پيچي آرميچر بر حسب ولت (V) می باشد.
- جریان الکتریکی : در سيم پيچي حلقوي ساده نسبت به سيم پيچي موجي ساده تعداد راه هاي جريان بيشتري ايجاد شده است، بنابراین سيم پيچي حلقوي نسبت به سيم پيچي موجي تحمل جريان بيشتري را خواهد داشت.
- مقاومت الکتریکی : کلاف های تشکیل دهنده سیم پیچی آرمیچر هر کدام دارای مقاومت اهمی بوده که این مقاومت ها در سیم پیچی نوع حلقوی یا موجی، در هر راه جریان با یکدیگر سری شده، و راه های جریان با یکدیگر بصورت موازی درآمده و مقاومت الکتریکی آنها با هم موازی می شوند که به آن مقاومت الکتریکی سیم پیچی آرمیچر می گویند.
- گشتاور : نیرویی که از طرف میدان مغناطیسی قطب های استاتور به هادی های حامل جریان در شیارهای روتور وارد می شود باعث ایجاد گشتاور در آرمیچر می شود که به آن گشتاور آرمیچر یا گشتاور الکترومغناطیسی (Electromagnetic Torque) می گویند و از رابطه زیر قابل محاسبه می باشد:
TA=(P/a) x Z x ϕ x (IA/2π)
که در آن IAجریان سيم پيچي آرميچر بر حسب آمپر (A)،ϕ فوران قطب ها بر حسب وبر (wb)، Z تعداد هادي هاي درون شيارهاي آرمیچر،P تعداد قطب هاي استاتور، a تعداد راه جريان سيم پيچي آرميچر و TA گشتاور آرميچر بر حسب نیوتن متر (N.m) می باشد.

عکس العمل آرمیچر(Armature Reaction)
در موتورهای جریان مستقیم با اتصال آرمیچر به منبع جریان مستقیم یا یک باتری، جریان الکتریکی در هادی های سیم پیچی آرمیچر جریان می یابد، که در نتیجه آن در اطراف روتور، میدان مغناطیسی ایجاد شده و به آن میدان عرضی می گویند.
از آنجاییکه سیم پیچی آرمیچر در میان قطب های استاتور قرار دارد، بنابراین میدان قطبها و میدان عرضی بر همدیگر تاثیر گذاشته و باعث تغییر شکل میدان طولی قطب ها می شود.
تاثیر میدان عرضی روتور به میدان طولی قطب ها را عکس العمل آرمیچر می نامند.
اثرات عکس العمل آرمیچر در ماشین جریان مستقیم
- اعوجاج وتضعیف میدان طولی قطب ها که باعث کاهش نیروی محرکه القایی و افزایش جریان موتور می شود.
- جابجایی صفحه خنثی که منجربه اتصال کوتاه هادی و جاروبک بر روی کموتاتور و در نتیجه ایجاد جرقه و تولید گرما که به کموتاتور صدمه می زند.
جابجایی محل جاروبک ها : تنها در ماشین های جریان مستقیم کوچک استفاده می شود که در آن جاروبک ها به اندازه دو سوم بار کامل ماشین جابجا و ثابت می شوند.
روش های مقابله با عکس العمل آرمیچر
قطب های کموتاسیون :
این روش در ماشین های با جریان مستقیم بالای یک اسب بخار استفاده می گردد.
در این روش جرقه زیر جاروبک ها رفع شده ولیکن اثری در بهبود اعوجاج میدان طولی قطب ها ندارد. این قطب ها در فاصله بین قطب های اصلی موتورهای DC و در محل صفحه خنثی قرار می گیرند.
میدان مغناطیسی قطب های کموتاسیون از طریق سیم پیچ آنها که با سیم پیچی آرمیچر سری هستند ایجاد می شود.
کموتاسیون
تغییر جهت جریان در کلاف های آرمیچر را کموتاسیون و مدت زمانی که طول می کشد تا جاروبک از یک تیغه به تیغه دیگر کموتاتور برود را زمان کموتاسیون می نامند.
کموتاسیون علاوه بر کاهش عکس العمل آرمیچر اثر خودالقایی کلاف اتصال کوتاه شده سیم پیچی آرمیچر در زمان کموتاسیون را نیز اناجام می دهد.
سیم پیچ های جبران کننده
سیم پیچ هایی که درون شیارهایی در کف قطب ها و به موازات شیارهای آرمیچر قرار گرفته و با سیم پیچی آرمیچر سری می شوند که در نتیجه با تغییر جریان آرمیچر، جریان سیم پیچ های جبران کننده نیز تغییر می یابد.
با نصب سیم پیچ های جبران کننده اعوجاج میدان طولی و جرقه زیر جاروبک ها از بین رفته ولیکن نصب آنها قیمت موتورهای جریان مستقیم رو افزایش می دهد.
این سیم پیچ ها در موتورهای با توان بالا با توجه به توجیه اقتصادی آنها نصب می شود.
انواع موتورهای الکتریکی جریان مستقیم (DC)
همانطور که می دانید موتورهای الکتریکی به دو دسته موتورهای الکتریکی جریان متناوب (AC ) و موتورهای الکتریکی جریان مستقیم (DC) تقسیم بندی می شوند.
کاربرد موتورهای الکتریکی AC
کاربردهای صنعتی تک فاز یا جند فاز با توان بالا رو داشته و با سرعت و گشتاور چرخشی ثابت برای کنترل بارهای بزرگ در فن ها و پمپ های صنعتی و … کاربرد فراوانی دارند.
کاربرد موتورهای الکتریکی DC
در مدارات الکتریکی ، کنترل موقعیت، میکرو پروسسورها، PIC و رباتیک و همچمچنین کاربرهای صنعتی مختلفی با قابلیت کنترل حرکت مورد استفاده قرار می گیرند.
انواع موتورهای DC
- موتور جاروبک دار Brushed Motor
این توع موتورها اساساً از 2 بخش تشکیل می شوند. یک بخش که بدنه ثابت موتور (استاتور) نامیده می شود و قسمت داخلی موتور (روتور یا آرمیچر) نام داشته و در حال چرخش می باشد که در نتیجه منجربه حرکت شافت موتور می گردد.
نحوه اتصال سیم پیچی های استاتور که میدان الکتریکی را بوجود می آورند به سه حالت زیر به آرمیچر متصل می شوند
نحوه اتصال سیم پیچ های میدان به آرمیچر
موتورهای براشلس یا بدون جاروبک BLDC :
به منظور جلوگیری از ایجاد جرقه در کموتاسیون، جاروبک ها در این نوع موتورها حذف شده و بسیار شبیه به موتورهای DC مغناطیس دایم هستند.
با حذف کموتاسیون مکانیکی در این موتورها، مدار پیچیده تری بعنوان درایور در موتور اضافه شده است. در این موتورها روتور از جنس مغناطیس دایم بوده و سیم پیچ ها روی استاتور ثابت بوده و نمی چرخند، بنابراین نیاز به جاروبک برای عمل کموتاسیون وجود ندارد.
در موتورهای BLDC میدان مغناطیسی و روتور بواسطه مغناطیس دایم بودن، همواره با میدان استاتور سنکرون بوده و به همین دلیل کنترل سرعت و گشتاور موتور دقیق تر می باشد.
از طرفی ساختار یک موتور BLDC شبیه یک موتور AC از نوع سنکرون می باشد.
به منظور کنترل موتورهای براشلس نیاز به استفاده از ابزارها و روش های پیچیده تری نسبت به موتورهای جاروبک دار جهت تشخیص موقعیت زاویه ای روتور یا قطب های مغناطیسی می باشد.
در این خصوص از سنسوزهای موقعیتی همچون سنسور اثر هال (Hall Effect Sensor) و یا سنسورهای نوری استفاده می شود.
مزایا و معایب موتورهای براشلس نسبت به موتورهای جاروبک دار
مزایا: راندمان بالاتر، نویز الکترونیکی پایین، کنترل سرعت بهتر، قابلیت اطمینان بالاتر، حذف کموتاسون مکانیکی و در نتیجه حذف جرقه و طول عمر بالاتر
معایب: قیمت بالاتر و کنترل پیچیده تر
- موتورهای سروو Servo Motors :
سروو موتورها علاوه بر کاربردهای رباتیک و کنترل از راه دور کوچک، در کاربردهای صنعتی و بزرگ مورد استفاده قرار می گیرند چرا که می توانند در هر دو جهت به میزان 180 درجه چرخش داشته و بنابراین انتخاب مناسبی جهت کنترل دقیق موقعیت انتخاب شده می باشند.
برای این منظور سروو موتورها از یک موتور DC به همراه تجهیزات فیدبک موقعیت و تصحیح خطا ساخته می شوند. موتورهای DC سروو در یک مدار بسته قرار می گیرند.
- موتور پله ای Stepper Motor :
استپر موتورها در واقع همان سروو موتورها بوده که از روش کنترلی متفاوتی استفاده می کنند.
در موتورهای پله ای چندین الکترو مغناطیس دندانه دار که در اطراف چرخدنده مرکزی قرار دارند، جهت تعیین موقعیت روتور استفاده می شود. استپر موتورها دارای مدار حلقه باز بوده و طراحی ساده تری نسبت به سروو موتورها دارند.
پارامترهای موثر در انتخاب سروو موتور یا استپر موتور
به منظور انتخاب سروو موتور یا استپر موتور نیاز است پارامترهای مختلفی براساس کاربرد مورد استفاده آن همچون: دایم یا مرحله ای بودن کار موتور، مصرف انرژی، قابلیت اطمینان، هزینه، سر و صدای موتور، سرعت کارکرد، مکانیزم بازخورد، طول عمر، گشتاور، کارآیی و … در نظر گرفته شود.
به منظور دریافت مشاوره، آگاهی از لیست قیمت و سفارش محصولات با مشاورین و کارشناسان شرکت گذرگاه صنعت و تجارت ایرانیان تماس حاصل فرمایید.
تلفن : 888 200 89 –021
فکس : 888 230 15 –021
در اسرع وقت پاسخگو هستیم.




مقاله مفیدی بود
برای پروژه ام استفاده کردم تشکر فراوان